 JetBrains PhpStorm 最新版 v2020.2.1
JetBrains PhpStorm 最新版 v2020.2.1
 PyCharm 专业版 v2023.1.1
PyCharm 专业版 v2023.1.1
 Rider 2019 最新版
Rider 2019 最新版
 UltraEdit 官方版 v29.00
UltraEdit 官方版 v29.00
 phpstorm 2019 官方版
phpstorm 2019 官方版
 IDM UEStudio 中文版 v19.20.0.38
IDM UEStudio 中文版 v19.20.0.38

机器人快车 是一款面向工业机器人领域的图形化编程与仿真软件。它通过直观的拖拽式逻辑流程图界面,显著降低了机器人编程的技术门槛,让工程师无需深入掌握传统机器人语言也能快速部署和调试任务。软件集成了三维虚拟仿真环境,支持对机器人工作轨迹、节拍及碰撞进行精准模拟验证,有效缩短产线调试周期并降低实体设备试错风险。广泛应用于焊接、搬运、喷涂等智能制造场景,是提升机器人应用开发效率的一体化解决方案。
软件亮点
编程逻辑:遵循自顶向下的设计流程,通过流程图直观展示程序结构,培养系统性思维。
跨平台支持:兼容多种操作系统,适配不同版本的机器人控制器(如RCU系列)。
资源丰富性:提供示例项目与教程(如微课视频),帮助用户快速上手。
功能介绍
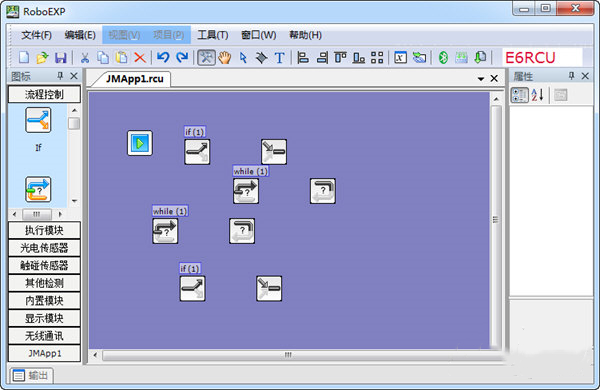
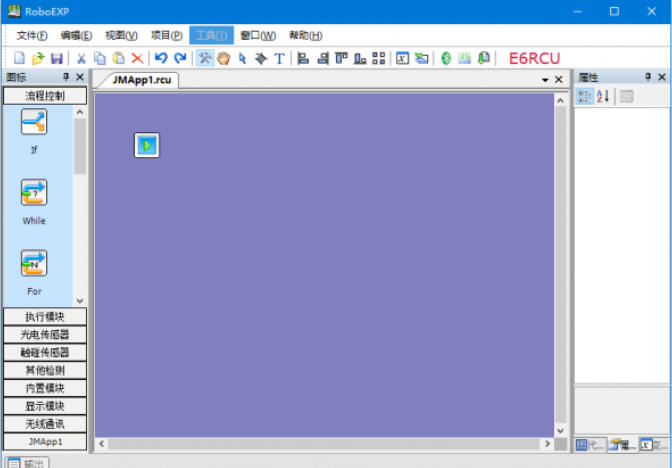
图形化编程界面
基于工程C语言,功能模块以图标形式呈现,用户通过拖放图标绘制流程图,软件自动生成可视化C语言源代码。
无需编写复杂代码,降低编程门槛,适合初学者快速掌握机器人控制逻辑。
模块化设计
提供强大的模块封装和管理功能,支持用户自定义模块,方便爱好者交流与团队合作。
模块库包含传感器、执行器、通信等常用功能,覆盖机器人开发的多样化需求。
多版本兼容与更新
允许不同版本的函数共存,用户可设置系统提示更新或手动更新模块。
编译功能需指定编译器(如中鸣编译器 JMCompiler.exe),确保代码可执行性。
硬件适配与调试
支持硬件信息配置,用户可自定义控制器接口,适配不同型号的机器人硬件。
提供硬件类型与端口的增删改功能,方便扩展硬件功能。
教学与进阶支持
保留传统文本编程功能,支持代码同步生成与调试,为进阶学习提供路径。
开放内核设计,用户可学习模块内核原理,深入理解编程逻辑。
软件特色
易用性:图形化界面降低学习成本,适合编程初学者。
扩展性:模块化设计支持自定义功能,满足多样化开发需求。
稳定性:代码生成与编译流程成熟,适合教育场景与竞赛环境。
常见问题
编译器配置错误
问题:编译时提示找不到编译器或编译失败。
解决方案:
点击菜单栏“工具”→“选项”,在“编译器”项中指定正确的编译器路径(如中鸣编译器 JMCompiler.exe)。
确保编译器文件存在于安装目录的 Compiler 文件夹下。
硬件信息配置错误
问题:机器人无法响应控制指令。
解决方案:
点击“项目”→“硬件信息”,检查硬件类型和端口定义是否与实际控制器匹配。
确认硬件类型(如电机、传感器)的针脚定义正确,禁用未使用的针脚。
不同版本函数冲突
问题:打开项目时提示模块版本不兼容。
解决方案:
在“选项”→“全局设置”中,选择“提示更新”以在打开项目时自动检测版本差异。
手动更新模块或调整项目设置以兼容当前版本。







































